ACモーターのベクトル制御(1/3 ページ)
ACモーターの制御方式の1つに「ベクトル制御」がある。これを適用することにより、ACモーターの制御モデルが簡単になるとともに、トルクの瞬時制御などの面で、ダイナミック応答に優れた特性を得ることができる。本稿では、このベクトル制御技術について詳細に解説する。
この記事は会員限定です。会員登録すると全てご覧いただけます。
IC技術の恩恵
ACモーターの制御にはさまざまな手法が用いられる。その制御方式の1つが本稿のテーマであるベクトル制御(field oriented control:FOC)だ。その基本的な原理は、ACモーターに流す電流をトルク生成電流成分と磁束生成電流に分離し、それぞれを独立に制御するというものである。
従来、ベクトル制御技術によるACモーターの制御は、工業用途に用いられる高性能なACモーターのサーボシステム以外に使用されることはなかった。しかし、現在では、ベクトル制御のアルゴリズムが実装されたICが登場したことにより、低価格な産業機器や小型の機器などの用途にも普及し始めている。
本稿では、このベクトル制御について詳細に解説するが、まずはそのための基礎となるものとして、モーターに関する知識から押さえよう。
モーターの基本
モーターにもさまざまな種類があるが、その動作原理には共通点がある。それを簡略化して例示すると図1(a)、(b)のように表すことができる。図1(a)のように、回転子(rotor:ローター)が電機子(armature:アーマチュア)である場合を考える(これはDCモーターに相当する)。固定子(stator:ステータ)である界磁磁極が空隙に磁界(磁束)を生成し、その磁界が、電流の流れる電機子と相互作用する。このとき、2つの動作原理が働く。1つはフレミングの左手の法則であり、磁界と電機子に流れる電流との相互作用によって電機子に電磁力が働き、電流に比例したトルクが発生する。2つ目はフレミングの右手の法則であり、磁界中を電機子が運動するとそれに伴って電圧が生じる。この電圧は逆起電力と呼ばれ、その値は電機子の運動角速度に比例する。電機子が回転すると、その内部の回転軸に対称に配置されたコイルは、互いに逆方向の磁界を横切る。コイルに流れる電流の向きが磁界の向きに対し一定の条件を満足するよう切り替われば、発生するトルクの向きは常に同一方向になる。また、電機子に生じる逆起電力も回転によって極性が切り替わる。抵抗や誘電体、摩擦などが存在しない理想的なモーターでは、電機子に供給された電気的エネルギはそれと等価な機械的エネルギに変換されることになる。このような基本構成のモーターにおいては、機械的スイッチである整流子によって電機子とブラシが接続され、コイルの電流と電圧の極性が切り替えられる。
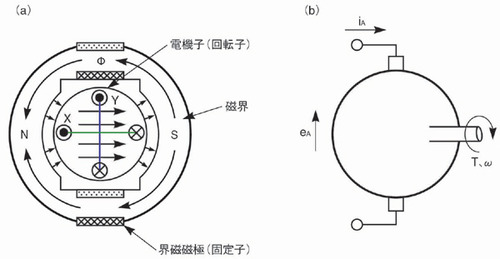 図1 DCモーターの原理を表すモデル 電機子であるコイルに流れる電流の極性は整流子とブラシの作用により切り替わる(a)。原理的には、モーターの動作は電機子電流iAと逆起電力eA、トルクT、回転角速度ωにより規定される(b)。
図1 DCモーターの原理を表すモデル 電機子であるコイルに流れる電流の極性は整流子とブラシの作用により切り替わる(a)。原理的には、モーターの動作は電機子電流iAと逆起電力eA、トルクT、回転角速度ωにより規定される(b)。 図1(b)はDCモーターの基本構成であり、また同時に、制御システムに使用される実際のDCモーターやACモーターの基本構成でもある。この図において、出力トルクをT、逆起電力をeA、1つの磁極当たりの磁束をΦ、電機子電流をiA、回転子の回転角速度をω、電機子係数(コイルの巻き数と磁極対の数により決まる)をkAとすると、T=kAΦiAおよびeA=kAΦωの関係が成立する。この2つの式をまとめると、Tω= kAΦiAω=eAiAの関係式が得られる。この関係式は、電気的エネルギが機械的エネルギに等しく、エネルギ保存の法則が成立していることを示すものだ。巻線界磁型モーターにおいて、磁束Φは界磁電流iFによって決まり、Φ=F(iF)L≒LMiFのように表される。一方、永久磁石型モーターではΦ=ΦMの一定値になる。
DCモーターでは界磁磁極が固定され、電流の流れる電機子が回転する。つまり、界磁磁極が固定子で、電機子が回転子である。実際のDCモーターをモデル化する際にはコイルのインダクタンスと抵抗を含めることになる(図2)。電機子のコイルの抵抗による電圧降下が小さい場合、モーターの逆起電力eAは電機子への印加DC電圧VAにほぼ等しくなる。DCモーターの特徴は、回転速度の調整が容易なことで、電機子への印加電圧を回転速度の目標値に応じて変更可能な開ループで制御できる。
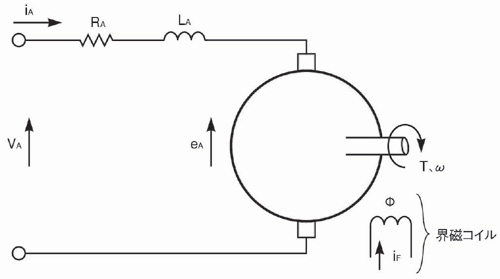 図2 DCモーターの等価回路 このDCモーターのモデルはコイルの抵抗とインダクタンスを含む。これらは温度依存性を持ち、コイルの応答特性を変化させる。
図2 DCモーターの等価回路 このDCモーターのモデルはコイルの抵抗とインダクタンスを含む。これらは温度依存性を持ち、コイルの応答特性を変化させる。 回転速度の制御手法としては、ほかに弱め界磁制御がある。これは、電機子への印加電圧を一定に保ちながら、界磁磁極にコイル(界磁コイル)を用いて、それに流れる電流を制御する方法だ。これによって、ある一定レベル以上高速になった場合にじゃまになる逆起電力を、界磁磁極による磁界を弱めるという手法によって下げることができる。また、高速回転時は、回転速度と電流が反比例するため電流が少なくて済むという利点がある。
一般に産業用途向けコントローラの設計者は、電機子への印加電圧を制御する方式を好んで採用する。これは印加電圧と回転速度の間に線形の関係が成り立つからである。ところが、この方式では電機子への印加電圧が限界に達する(電源電圧レベルまで上がる)と回転速度が上げられなくなる。従って、その制限以上の高速回転を得るためには、界磁コイルを用いてその電圧を制御することになる。
ループ制御の手法としては開ループ制御と閉ループ制御がある。例えば、工業用ロボットや組み立て装置などの用途では、瞬時制御などのダイナミック応答が要求される。そのため、閉ループ制御が利用される。一般的な閉ループ制御は電流制御ループと速度制御ループから構成される。電流制御ループはコイルの電気的固有応答を補償し、速度制御ループは機械系の応答を補償する。電流制御ループの帯域幅は速度制御ループのゲインに影響しないよう十分に広くする必要があり、標準的な設計では速度制御ループの帯域幅より1桁以上高く設定するのが一般的である。
DCモーターは、固定子である界磁磁極(界磁コイル)と回転子である電機子を備えている。その界磁磁極により空隙の磁束が生成され、電機子に流れる電流によってトルクが発生する。一方、ACモーターは回転子である界磁磁極と固定子である電機子を備える。そして、固定子に流れる電流によりトルクが発生する。いずれの場合にも安定なトルクを発生するためには、空隙の磁束の向きと電流の向きをアライメントする必要がある。DCモーターではブラシと整流子の作用により電機子に流れる電流の向きと静止した界磁磁束の向きがアライメントされる。一方、ACモーターでは、固定子電流と回転子電流の位相を同期させることによりアライメントが行われる。
ベクトル制御の原理
上述したACモーターとDCモーターの対応を考え、回転座標系という数学的テクニックを取り入れてACモーター制御を簡素化するのがベクトル制御である。
ACモーターを、回転子と同期して回転する座標系(回転座標系)から見ると、回転子である界磁磁極が静止して見える。一方、固定子は回転する電機子に見える。すなわち、ACモーターにおける電機子を、DCモーターにおいて整流子によって回転とともに電流極性が切り替わる電機子の動作に置き換えることが可能なのだ。この点がベクトル制御の基本となる。
言い換えると、ベクトル制御とは、静止座標系から回転座標系への変換によりACモーターをそれと等価なDCモーターとしてモデル化するものだ。このようなDCモーターモデルへの変換によって、振幅と周波数が変化するAC電流とAC電圧を考慮しなければならないACモーター制御が、DC電流とDC電圧を検討するだけで済むようになる。
Copyright © ITmedia, Inc. All Rights Reserved.
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。