デジタルフィルターとアナログフィルター(2)――デジタルフィルターの動きを見ながら理解する:ソリューションライブラリ
信号処理用フィルターについて解説する本連載。今回は、デジタルフィルターに着目し、フィルターにはどのようなものがあってどのような違いがあるのかを紹介しながら、実際にフィルターを動かしてみたいと思います。
ソリューションライブラリ第1回「デジタルフィルターとアナログフィルター(1)――デジタルフィルター超入門編」では、デジタルフィルターとアナログフィルターそれぞれの特長について解説し、それぞれの原理や特性について技術的な視点から紹介しました。
第2回となる今回は「デジタルフィルターとアナログフィルター(2)デジタルフィルターの動きを見ながら理解する」と題して、デジタルフィルターに着目し、フィルターにはどのようなものがあってどのような違いがあるのかを紹介しながら、実際にフィルターを動かしてみたいと思います。
1)移動平均フィルターの問題点
第1回で、フィルターにはFIRフィルターとIIRフィルターがあり、最も簡単なものに移動平均によるフィルター処理があることを紹介しました。
さて、信号処理において移動平均フィルターだけ知っておけばノイズ対策は万全なのでしょうか?
実は、移動平均フィルターには欠点があります。これから実例をご紹介します。
例えば、図1のようなノイズ波形があったとします。

この波形に対して、N=10で移動平均をかけてみましょう。

かなりのノイズが除去できたように見えますが、まだ少しいびつな形が残っています。
では、さらに移動平均を強くかけてみます。次数を増やしてN=20としましょう。

元の形から、だいぶ離れてしまいました。また、N数が増えるほど振幅のピーク値も落ちてきます。
移動平均は、複雑な公式が不要で比較的手軽に使えるのがメリットですが、ノイズ除去を期待して次数を上げていくとこのように、早い段階で波形が崩れてしまい、オリジナルの波形とだいぶ変わってしまいます。そのため移動平均はノイズ対策にベストな手法とはいえません。
2)ノイズを把握する ―フーリエ解析―
そもそも、ノイズ成分というのはどこに潜んでいるのでしょうか。ノイズ対策を行うには、まず「ノイズを知る」ことが重要です。
先にご紹介した図1は、時間軸に伴ってプロットされた波形です。これを周波数軸に伴った波形に変換します。ここではフーリエ変換を用います。
フーリエ変換を使うと、時間軸のデータ郡を周波数軸のデータ群に変換することができます。
図1の波形に対して、フーリエ変換を実行し、周波数を横軸にとってプロットしたものを図4に示します。

一番レベルの高い周波数成分が必要な波形ですが、それ以外に部分的に飛び出ている箇所がありますね。
これらが必要な信号以外の雑音(ノイズ)と判断します。これらノイズを必要とする波形を壊さずにできるだけ取り除くことができれば良いのです。
3)ローパスフィルターを活用する
移動平均法によるフィルタリングでは、周波数に関係なく均等に処理が行われます。これだと、残しておきたい周波数成分までつぶしてしまいます。そこで移動平均法に変わって登場するのが、ローパスフィルターです。
ローパスフィルターは、低域の周波数帯はほぼ変えずに中広域の周波数帯を減衰させる特性を持ったフィルターです。図4ではノイズ成分と思われる箇所が3000Hz以降に表れていますので、3000Hz以降を除去するローパスフィルターに通してみます。
図5がローパスフィルターをかけた結果です。

フーリエ解析してみると、ノイズ成分が減衰しているのが分かります。
今回はローパスフィルターを例に紹介しましたが、他にもローパスフィルターとは逆に、低域の周波数成分を減衰させ、広域を通過させるハイパスフィルターや特定の帯域だけを通過させる帯域通過(バンドパス)フィルターなど用途に応じて幾つか種類があり、実際の組み込みではこれらを使い分けます。

4)FIRフィルターとIIRフィルターの使い分け
ローパスフィルターについてご紹介しましたが、今回はFIRフィルターとIIRフィルターについてです。果たして、両者はどのような特徴があるのでしょうか。
図7にノイズ入りの元波形(青)と、それに対してFIRローパスフィルターをかけた後の波形(赤)を示します。

同じように、元波形に対してIIRローパスフィルターをかけたグラフを図8に示します。

IIRローパスフィルターを通した結果はご覧のように元の波形からだいぶ崩れてしまいました。これは、IIRフィルターには直線位相特性を維持できないという特徴を持っていることにあります。
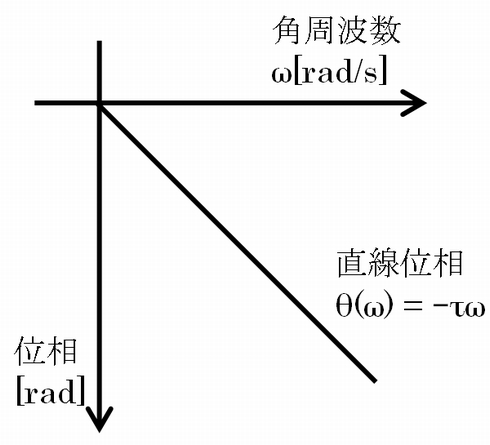
この直線位相特性とは、位相[rad]に対して角周波数ω[rad/s]の関係が、以下のように成り立つことをいます。τは定数で、任意の角周波数に対する遅延時間を意味します。これが一定である場合に直線位相特性(θ(ω)=-τω)があるということになります。
FIRフィルターは直線位相特性を維持できるため、図7のようにノイズ波形に対して有効に働きます。
 【図9】直線位相特性
【図9】直線位相特性直線位相特性のある波形は図9のような波形になり、対照的なインパルス応答が得られます。
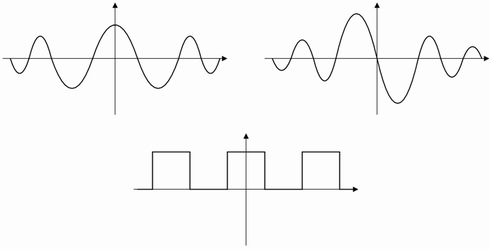 【図10】直線位相特性のある波形例
【図10】直線位相特性のある波形例対してIIRフィルターは、直線位相特性を維持できないというマイナス面があるものの、回路規模が小さくできることが最大のメリットです。デジタルフィルターを最終的にハードウェアに置き換えることを考える場合、IIRフィルターによる信号処理の実現を考慮するとよいでしょう。
デジタルフィルターは、場面に応じて使い分けることが重要になります。
5)動きを見てみよう!
デジタルフィルターについて語るには、多くのことを書かなければなりませんが、ここではデジタルフィルターはどういうものかを実際に動かしてみるためのデモファイルを用意しました。MicrosoftのExcel上で動かすことができるので、特別なソフトウェアやハードウェアは必要としません。
今回のExcelファイルはローパスフィルターを例にした、FIRフィルターとIIRフィルターの動きを理解するためのデモファイル(Excelファイル)となります(ダウンロードには、Solution-Edge会員への登録(無償)およびログインが必要です)。


Copyright © ITmedia, Inc. All Rights Reserved.
提供:ルネサス エレクトロニクス株式会社 / アナログ・デバイセズ株式会社
アイティメディア営業企画/制作:EDN Japan 編集部/掲載内容有効期限:2014年5月31日


2015年3月9日
津田建二の技術解説コラム【海外編】に知ってるつもりの外国事情(6)――IMECに見る研究開発のあり方を追加
2015年2月9日
津田建二の技術解説コラム【歴史編】に半導体の温故知新(6)――MOSトランジスタの次はTFET?を追加
2015年1月13日
津田建二の技術解説コラム【入門編】に半導体の基礎知識(6)――パワー半導体の広がりを追加
2014年12月8日
津田建二の技術解説コラム【海外編】に知ってるつもりの外国事情(5)――ネットワーキングを積極的に活用しようを追加
2014年11月10日
津田建二の技術解説コラム【歴史編】に半導体の温故知新(5)――ノーベル賞を受賞した半導体デバイスは実用的かを追加
2014年10月13日
津田建二の技術解説コラム【入門編】に半導体の基礎知識(5)――ワイヤレスに必要な半導体を追加
2014年10月6日
2014年9月8日
津田建二の技術解説コラム【海外編】に知ってるつもりの外国事情(4)――業界用語の常識を海外と比較するを追加
2014年9月1日
2014年8月11日
津田建二の技術解説コラム【歴史編】に半導体の温故知新(4)――IBM30億ドル投資の裏にCMOSの凄さありを追加
2014年7月28日
ソリューションライブラリ「デジタルフィルターとアナログフィルター(4):デジタル信号処理を徹底比較! フィルター特性と窓関数も解説」を追加
2014年7月14日
津田建二の技術解説コラム【入門編】に半導体の基礎知識(4)――IoTを定義しようを追加
2014年7月11日
Solution-Edge関連ニュースに信号の絶縁とAD変換が1つでできる便利な素子 AD7403を追加
2014年6月30日
ソリューションコラムにアナログ・デバイセズの実用回路集「Circuits from the Lab」の使い方を追加


2014年9月、ルネサス エレクトロニクスのイベント「DevCon Japan2014」にて、加賀デバイスブースにてソリューションエッジのインターポーザボード「SE SP-01」を使ったデータ・アクイジション・システムのデモが披露されました。今回は、このデモの詳細を加賀デバイスの開発担当者自らがご紹介します。

アナログ・デバイセズの実用回路集「Circuits from the Lab」を活用して、ルネサス エレクトロニクスのマイコン評価環境とつないで、お手軽、簡単データアクイジションシステムを構築してみましょう!

ソリューションコラムでは、これまでSE SP-01を使用したさまざまなバリエーションのデモをご紹介してきました。今回ご紹介するのは、アナログ・デバイセズの超低消費電力18ビット1Mサンプル/秒のA/DコンバータAD7982を、なんとGR-KURUMIを使用して制御&デバッグをします!

電子工作好きの皆さんにはおなじみの小型電子工作ボード(ガジェット)「GR-SAKURA」。このGR-SAKURAにセンサーを接続していろいろな装置作りにチャレンジしている方も多いと思います。そして、いろいろ工作しているうちに「もっと高精度なセンサーを使いたい」という欲求が生まれているかと思います。でも、高精度センサーをGR-SAKURAを接続するには、結構な技術力が要求されます。そこで、今回、Solution-Edgeオリジナルのインターポーザボード「SE SP-01」を使って、GR-SAKURに高精度センサーを手軽に取り付ける手順とプログラムをご紹介します。ぜひ、皆さんもSE SP-01でGR-SAKURAを究極まで進化させてください。

前回のソリューションコラムでは、SE SP-01を使って手軽にシステム構築ができる一例を紹介しました。今回は、前回に組み上げた評価環境を実際に動作させていく様子をご紹介します。SE SP-01の素晴らしさを、よりご理解頂けると思います。

アナログ・デバイセズ製の各種デバイスと、ルネサスエレクトロニクス製マイコンボードを簡単につなぐことができるようになるインターポーザボード「SE SP-01」。実際どれくらい簡単なのでしょうか。早速、SE SP-01を使ってシステムを組んでみましょう。
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。