いまさら聞けないジャイロセンサー入門:しっかり分かる「センサーの活用法」(1/3 ページ)
スマートフォン、デジタルカメラ、カーナビなどに必ずといっていいほど搭載されるジャイロセンサー(角速度センサー)。ジャイロセンサーが角速度を検知する仕組みや応用例を紹介する。
ジャイロセンサーとは?
ジャイロセンサー(角速度センサー)とは、回転角速度の測定を実現する慣性センサーの一種です。角速度とは、ある物体の角度が単位時間当たりどれだけ変化しているか、つまり物体が回転している速度を表す物理量です。
動きを検知する慣性センサーの代表として、加速度センサーがよく知られていますが、ジャイロセンサーは加速度センサーでは反応しない回転の動きを測定します。近年ではジャイロセンサーも電子機器に一般的に搭載されるようになり、例えばスマートフォンやゲーム機器(手持ち機器のUIとして利用)、デジタルカメラ(手ブレ補正用のブレ検知)、カーナビ(車が曲がったことを検出)などで利用されています。また車載グレードに対応したジャイロセンサーであれば、安全走行支援として横すべり検知やエアバッグの作動用として横転検知にも使われます。車の回転を検知する、というのは直感的に分かりやすいですが、人間の手の動きというのも関節により円運動を多く含むため、手持ちで操作や手持ちによるブレを補正するにはジャイロセンサーで動きを検知するのが適している、というわけです。
本稿では数多くあるジャイロセンサー種別の中から、ICタイプの振動式ジャイロセンサーに焦点を当てて紹介をするとともに、シリコンに微細加工を施すことで駆動と検出に静電容量方式を利用したMEMSジャイロセンサーの原理を説明します。
振動式ジャイロセンサーの種別
ジャイロセンサーの角速度出力はdps(degree per second、°/秒)で表します。1秒間に1回転している物体の場合、角速度は360dpsとなります。ジャイロセンサーに要求される検出範囲は用途により異なります。一般的な例でいうと、モバイル機器のユーザーインタフェース用途であれば、300dps〜2000dps程度、手ブレ補正用途であれば150dps以下、また、カーナビなどの車向け用途だとその中間の100dps〜500dps程度の検出範囲に対応したジャイロセンサーが使われます。
ジャイロセンサーは、回転を検知する方式により分類することができます。現在、最も一般的に民生機器に搭載されているのは、ICタイプのMEMS(Micro Electro Mechanical System)技術を使った振動式ジャイロセンサーです。MEMS技術を利用した慣性センサーはその名前が示す通り、機械的な動きをする素子と、その信号を処理する電子回路を組み合わせた技術でセンサーを構成し、動きを検知します。振動式ジャイロセンサーの中には、シリコンを使う静電容量方式と、水晶や他の圧電材料を使うピエゾ方式の種類があります。ジャイロセンサーの主力用途であるスマートフォンやゲーム機といったアプリケーションでは3軸*)における回転を1つのICで検知できる製品が利用されています。振動式ジャイロセンサー以外の種別としては、地磁気式、光学式、機械式などがあります。
*)3軸は、一般に上下、左右、前後の3つの軸。なお、上下軸は「ヨー軸」、左右軸は「ピッチ(ピッチング)軸」、前後軸は「ロール軸」と呼ばれることが多い。
静電容量式ジャイロセンサーの角速度検出原理
振動式ジャイロセンサーの動作・検出原理と構造について、STマイクロエレクトロニクスで用いている静電容量方式のMEMSジャイロセンサーを例に説明します。
まず、振動式のジャイロセンサーは全てコリオリの力(転向力)を利用して回転を検知します。コリオリの力は、地球の自転によっても発生し、台風の渦巻き方向にも影響する力として有名です。コリオリの力を持ち出すと非常に壮大な印象を与えますが、シリコンを微細加工したミリ単位の構造体でも同じ力が発生します。
コリオリの力は、移動している質量に回転を加えた際に、その質量の移動方向と回転軸の両方に直交する方向に発生する力です。これを数式で表すと以下の通りです。

Fcor=コリオリの力
m=質量
Ωext=質量に加わっている角速度
V=質量が移動している速度
上記の数式はベクトルを用いており、xと表記されているのはベクトル積なので、角速度と速度の両方に直交する方向(正確に言うと、- がついているので、積により求められる軸の逆方向)にコリオリの力が発生することになります。これらのそれぞれの作用を図示したものが図1です。
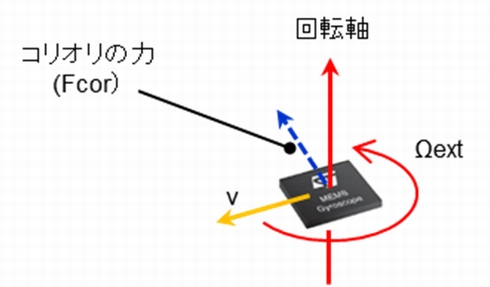 【図1】コリオリ効果による力の発生
【図1】コリオリ効果による力の発生振動式ジャイロセンサーの名前は、MEMS素子を振動させることで上記式のvを発生させることから由来しています。この振動している素子に外部から回転(Ω)が加わると、その素子にコリオリの力が加わります。そのコリオリの力を検知することで、物体に加わった角速度を逆算できる、という仕組みになっています。
コリオリ効果により発生する力は『F=m・a』という式からも見て取れるように加速度と比例しており、その検知方法は加速度センサーとよく似ています。具体的には、櫛歯構造の電極を利用してコリオリの力(加速度)により発生した変位を静電容量の変化として捉えることでその大きさを検出します。

図2にヨー軸の回転(水平面の回転)を検知するジャイロセンサーの検出素子部を示します。素子の振動を図の左右方向に発生させ、回転を面内に発生させると、その結果として図の上下方向にコリオリの力が発生します。素子の振動を発生させるには、図2で示している素子の上下に配置されている青い櫛歯状の電極に交互に電圧を印加することで静電力を発生させます。この振動している素子に対して回転運動が加わると、コリオリの力が発生します。この図の上下方向に発生する力を、図2で示している素子の左右に配置されているオレンジ色の櫛歯電極で検知します。このセンシング部により得られた信号を同じパッケージに搭載された後段の信号処理用ASICで増幅、フィルタリング、同期を取り、角速度として調整した後に出力します。
Copyright © ITmedia, Inc. All Rights Reserved.
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。