ぶつからないロボットに欠かせない! 超音波センシングのススメ:人とロボットの共存に向けた技術解説
人とロボットの共存には、ロボットは障害物を検出することが不可欠です。障害物を検出する技術はいくつかありますが、超音波センシング技術の利用をオススメします。超音波センサーを使う利点や超音波センシングシステムの構成要素をご紹介しましょう。
ロボットが家を建てたり、道路を敷いたりする日も近いことでしょう。現在、人間が行っている作業の多くをロボットが行うような未来を現実のものにするための重要な要件の1つに、ロボットが人間と同じような感覚を持つことがあります。
ロボットの課題の1つは、人間や壁、家具、設備、他のロボットなどと衝突せずに移動できる経路をどのように見つけるか、です。ロボットは障害物を避けて作業を行うために、数センチから数メートル先の障害物を検出する必要があります。障害物を検出するための一般的なテクノロジーには、次のようなものがあります。
- 超音波センシング
- 超音波を送信し、障害物から反射されて戻ってくるエコーを探知。
- 光学式ToF(Time-of-Flight)センサー
- フォトダイオードを使用して、障害物から反射された光波を検出。
- レーダーセンサー
- 無線周波数の電波を使用し、物体から戻ってくるエコーにより、移動する物体の方向と距離を測定。
本記事では、超音波センシングに焦点を当てます。なぜなら、家庭や工場では、ロボットが高速で動作する必要がないため、超音波センシングは、レーダーよりも低速ですが低コストで実用的な方法と言えるからです。また、超音波センシングは、障害物から反射される光の量(明暗)に影響されないため、障害物の回避に関して光学式ToFよりも信頼性が高くなるためです。物体の検出に光ではなく音波を使用するため、ガラスなどの透明な面も検知できることも超音波センシングのメリットの1つです。
多くのロボット用アプリケーション
ロボット掃除機のように、命令を受けたり、設定されたスケジュールに従って動いたりするシステムを設計するための良い方法は、埋め込まれた超音波センサーによって周囲360度全体をカバーすることです。センサーの個数や間隔は、形状と超音波センサーの視野(Field of View:FOV)に依存します。
 図1:家庭用および個人用ロボットの例
図1:家庭用および個人用ロボットの例ロボット掃除機が動き回る間、超音波センサーのネットワークが障害物をマッピングし、障害物からの距離を計算し、この情報をCPUに提供することで、障害物を回避します。統合された超音波センサーによる同様のアプローチが、対話型のロボット玩具、レストランや小売店のサービス用ロボットなどにも適用できます。
次に、組み立てラインのロボットや、工場のフロア内や倉庫内での運搬ロボットを考えます。現代の工場では、図2のようなロボットアームが製品を組み立てます。
 図2:組み立てライン用ロボットのシステム構成要素
図2:組み立てライン用ロボットのシステム構成要素ロボットを工場で使用する際に重要なことは、複数のロボット間で衝突が起こらないようにロボットにセンサーを埋め込むことです。ロボットアームや移動ロボット車両内の適切な位置に取り付けられた超音波センサーによって、近くの物体の知覚と距離情報が得られ、ロボットシステムのCPUがそれらの情報を利用して衝突を回避することができます。障害物回避システムには、以下のような構成要素があります。
障害物回避システムの構成要素
超音波トランスデューサ
超音波トランスデューサは、AC電圧が印加されると振動して超音波を発生させる圧電性結晶であり、反射波を受けると逆の動作を行います。トランスデューサには2つの種類があり、クローズド・トップ型は圧電性結晶が密封されて外部の環境から保護されています。オープン・トップ型は結晶が露出しているか、スピーカーのメッシュのようなもので覆われています。クローズド・トップ型のトランスデューサには高い駆動電圧が必要であるため、システム内に追加の部品としてトランスが必要になります。
トランス
シングルエンド型またはセンタータップ付きトランスによって、クローズド・トップ型トランスデューサの駆動に必要な高電圧を生成します。
超音波信号プロセッサおよびトランスデューサドライバ
例として、Texas Instruments(TI)の『PGA 460』は、トランスを駆動し、反射波により発生する電気信号を処理し、関連するエコーのそれぞれについてToFデータをリアルタイムで計算します。
CPU
ロボットシステムのCPUは、ロボットの周囲に取り付けられた複数の超音波センサーからのToF情報を使用して、障害物をマッピングし、プログラミングに従って、ロボットを停止させたり、障害物を避けて動かしたりします。
超音波トランスデューサとTIの『PGA 460』超音波信号プロセッサおよびドライバICを組み合わせた超音波トランシーバモジュールの例を、図3に示します。このモジュールの設計ファイルは、TIウェブサイトから入手できます。
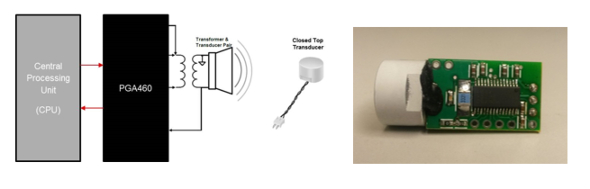 図3:超音波トランシーバ・モジュールの例
図3:超音波トランシーバ・モジュールの例関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
提供:日本テキサス・インスツルメンツ合同会社
アイティメディア営業企画/制作:EDN Japan 編集部/掲載内容有効期限:2019年4月10日






![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。